MUC(微控制器)程序将执行一个主要用于实现最大功率点追踪(MPPT)功能的控制算法,调节输出功率以适应输入电压的波动。下面是程序实现的基本思路和提示:
1. 初始化阶段
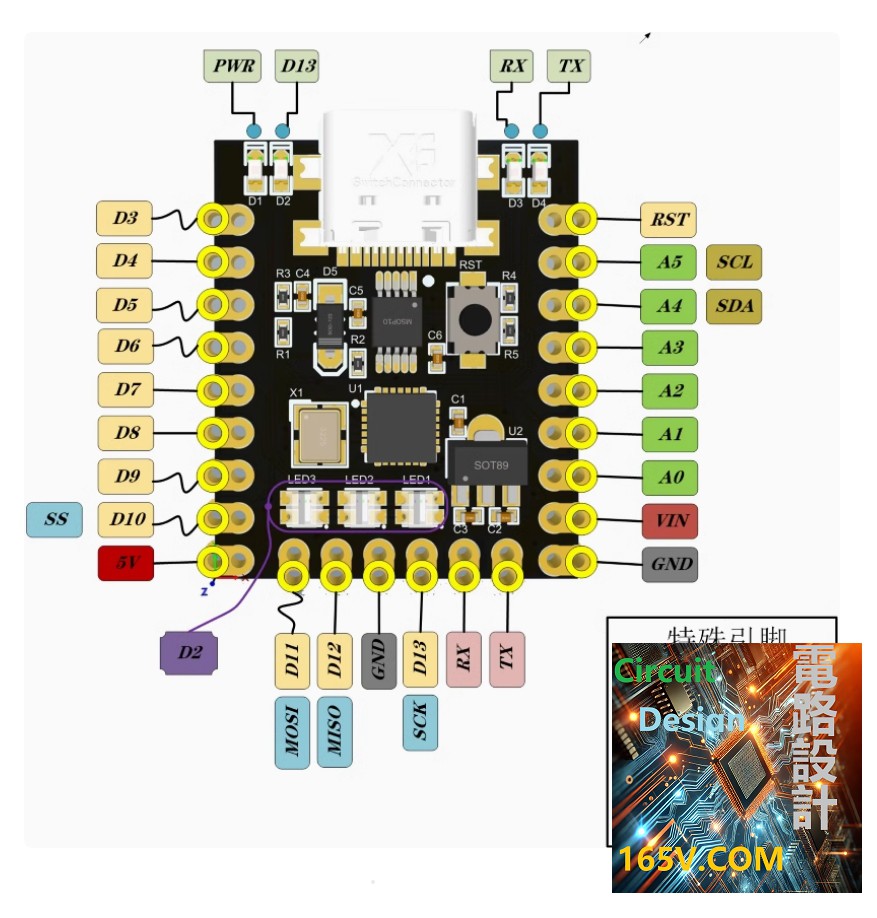
定义引脚:设置输入输出引脚,用于电压、电流的采集以及控制MOSFET的PWM输出(如PMW-H和PMW-L)。
初始化ADC:配置ADC模块,采集输入电压、电流及其他关键参数。
初始化PWM:设置PWM频率和初始占空比,确保电路能够启动。
2. 数据采集和信号处理
采样输入电压和电流:定期通过ADC读取输入电压(V-IN)和输入电流(I-IN),记录用于计算输入功率。
电压、电流滤波:若输入信号有噪声,执行低通滤波器算法,平滑采样值。
3. MPPT算法
使用MPPT算法(例如扰动观察法或增量导数法)调整PWM占空比,确保系统在最大功率点运行。
算法步骤:
计算当前功率:功率 = 电压 × 电流。
比较前后两次的功率变化和电压变化,决定下一步的PWM调节方向。
如果功率增加,保持当前调整方向;如果功率减少,反转调整方向。
4. PWM控制
调整PWM信号:根据MPPT算法的结果,增加或减小PWM的占空比,以调节MOSFET的开关周期,从而控制输出电压和电流。
频率和占空比限制:为了保护电路,设置PWM频率和占空比的上限和下限,避免过高或过低的功率输出。
5. 保护和故障处理
输入电压/电流监控:实时检测输入电压和电流是否超出安全范围,若超出则停止PWM输出以保护电路。
温度监控(若有):可以增加温度传感器,监控MOSFET的温度,防止过热。
故障处理:当检测到过压、过流或其他故障时,停止输出并触发告警。
6. 输出数据与状态
数据输出:通过串口或LED等显示当前状态,如输出功率、电流和电压等。
状态指示:可以利用LED显示不同状态,如正常运行、待机或故障等。
简化的程序流程图
1. 初始化系统
2. 开始采样输入电压和电流
3. 执行MPPT算法
4. 调整PWM信号
5. 检测电压、电流是否在安全范围内
6. 更新状态显示
7. 返回步骤2,循环执行
这种程序结构可以确保系统实时调节,使输入功率保持在最大功率点,实现高效的能量转换。下面是更新电路图后的描述:
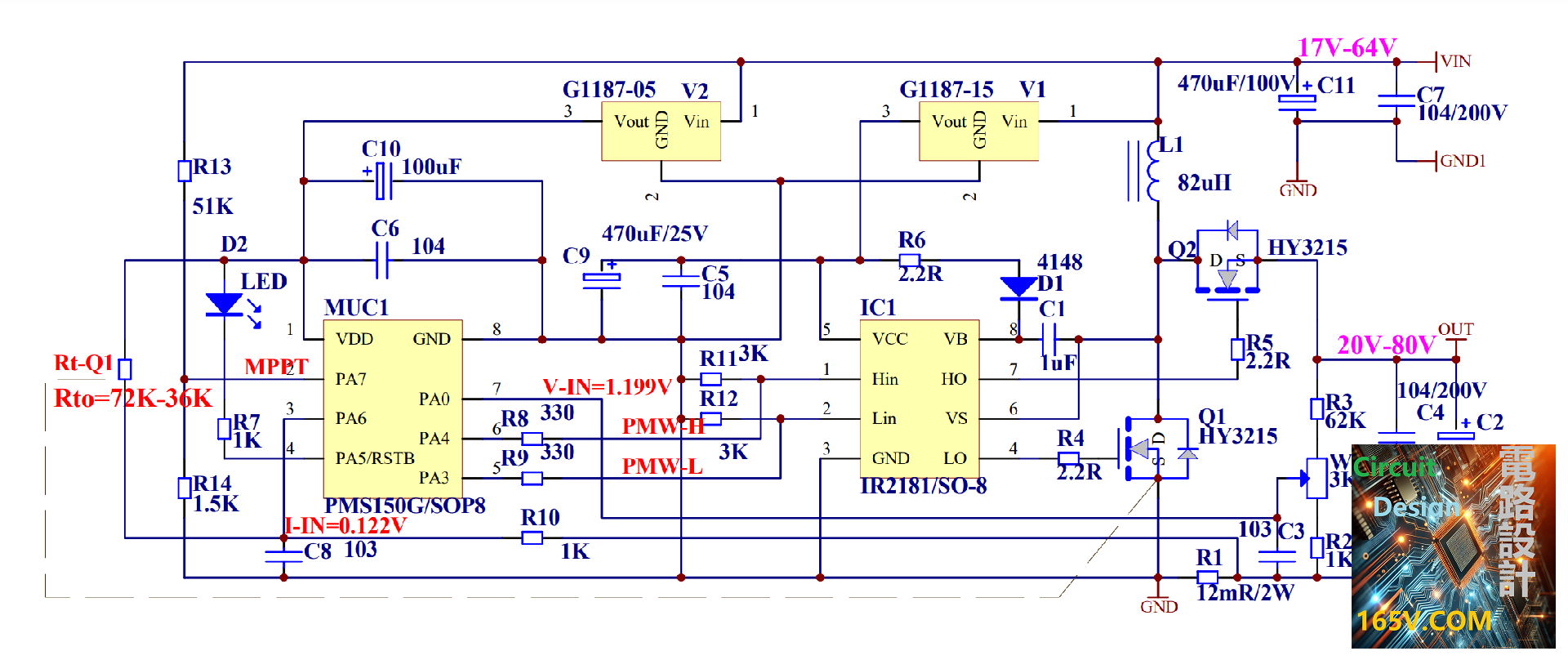 更新电路图中已经添加了温度保护电路,并对MUC(微控制器)引脚进行了更清晰的定义。以下是对新的电路设计的分析和各部分描述。
更新电路图中已经添加了温度保护电路,并对MUC(微控制器)引脚进行了更清晰的定义。以下是对新的电路设计的分析和各部分描述。
1. 温度保护电路
温度保护电路:通过热敏电阻或RT-Q1元件检测温度。Rt-Q1连接到一个电阻网络(如Rto=72K-36K),可以根据温度变化调节电阻值。
保护触发:当温度超过设定阈值时,MUC将会检测到电压变化(由温度电阻网络分压而成),并根据此信号触发保护措施,比如关闭PWM信号输出来停止功率传输,从而保护电路免受高温损害。
2. 主要组件和控制
IC1(IR2181):依然作为高低侧驱动器,用于驱动MOSFET(Q1、Q2),控制电流流向,以实现DC-DC转换。
MOSFET (Q1, Q2 - HY3215):主要的开关管,用于MPPT算法中的调节,结合PWM信号来控制能量传输。
电感L1(82uH):负责滤波和储能,处理输入电流的平滑。
3. MUC引脚功能
PA0, PA3, PA4, PA5:这些引脚用于连接到外部的测量和控制信号,例如输入电压(V-IN)和输入电流(I-IN)采样。
PWM控制引脚**(PMW-H和PMW-L):通过设置PWM信号调节MOSFET的占空比,以实现最大功率点跟踪。
温度检测引脚(Rt-Q1接入的引脚):该引脚用于采集温度信号,判断是否需要启用温度保护。
4. 输入和输出
输入范围:MPPT输入电压范围为20V-80V,输出电压在17V-64V之间,说明电路具有较广的适应范围,可以处理不同输入的变化。
电压、电流监控:电流通过低阻值电阻R1(12mR)测量,而电压则通过电阻分压(如R3和WR1)来获得,微控制器通过这些信号进行MPPT算法控制。
5. 保护与状态指示
温度保护:通过Rt-Q1网络和MUC采集到的温度信号,控制输出的开关,防止温度过高时继续运行。
LED指示灯(D2):可能用于状态指示,比如在温度保护启动或电路故障时,显示不同的状态。
工作流程总结
1. 初始化阶段:定义引脚,初始化ADC和PWM。
2. 数据采集:定期采集电压、电流和温度。
3. MPPT控制:使用采集的数据执行MPPT算法,调节PWM占空比。
4. 温度监控:若温度超过设定值,触发保护措施,停止PWM输出。
5. 状态显示:通过LED或其他方式显示电路状态。
新的设计不仅可以实现最大功率点追踪,还能提供温度保护,大大增强了系统的安全性和稳定性。
根据您提供的单片机(MUC)脚位定义和工作步骤,我整理了一个控制流程,以帮助您进一步理解和优化程序:
1. 初始化过程
上电复位:复位后,初始化A5测量值,其他脚保持静止状态,确保系统稳定后再进行操作。
2. 太阳能电压监测
低电压检测:如果PA7 < A5a,设置PA5 = D9c(即LED慢闪烁3秒),表示太阳能板电压过低。
高电压检测:如果PA7 > A5c * 3S,设置PA5 = D9a(即LED快闪烁0.5秒),表示太阳能板电压过高。
3. MPPT参考值记录
电压区间判断:根据PA7的值确定当前最大功率点参考(MPPT)电压。根据不同的电压区间,设置相应的MPPT基准值:
- 如果PA7 > A5a < A5a * S,则MPPT = A5a。
- 如果PA7 > A5b < A5b * 2S,则MPPT = A5b。
- 如果PA7 > A5c < A5c * 3S,则MPPT = A5c。
4. PWM控制
启用PWM输出:启用PA3和PA4的PWM信号,并根据以下条件调整PWM:
降低PWM占空比:若PA7 < MPPT或PA0 > PA0 + X,减少PWM占空比,降低输出功率。
电流保护:若PA6 = PA6或PA6 > PA6 + X,说明电流达到或超过设定值,关闭PWM以防止过流。
循环功率比较:若PA7 = MPPT且PA0、PA6在允许范围内,则进入频率比较循环,调节频率以优化输出功率。
5. 充电完成或空载指示
充电完成或无负载状态:当PA0达到设定值时,设置PA5 = D9b(即LED长亮),指示充电完成或无负载。
频率与占空比的设置
PWM信号相反:PA3和PA4输出相反的PWM信号,形成半桥驱动的互补开关。
占空比调节范围:最小为1%,最大为95%(180度),以1%步进调整。
频率调节范围:工作频率在60KHz至80KHz之间,步进为100Hz。
这样设计的控制逻辑可以使系统在MPPT条件下,安全地监测太阳能板电压、输出电流及温度等参数,实现自动调节PWM输出,保护电路并最大化功率传输。您可以基于此流程编写代码,并根据实际需求进行进一步优化。
根据我的设计要求和参数设置,为您提供了一个基本的伪代码示例,帮助您编写单片机程序。这个代码包含初始化、数据采集、MPPT算法以及保护功能,满足您提供的功能需求。
// 定义变量
float Vsolar, Vout, Iout, Temp; // 分别为太阳能板电压、输出电压、输出电流和温度
float MPPT = 0; // 最大功率点追踪基准电压
int PWM_duty = 50; // 初始PWM占空比为50%
int PWM_frequency = 60000; // 初始PWM频率为60kHz
bool charging_complete = false; // 充电状态指示
// 校准常数
const float A5a = 0.513, A5b = 1.0283, A5c = 1.541;
const float S = 0.087;
const float PA0_cal = 1.199, X = 0.002;
const float PA6_cal = 0.122;
// LED指示模式
enum LED_Mode { D9a, D9b, D9c };
LED_Mode LED_status = D9c; // 初始为慢闪烁
// 初始化函数
void setup() {
init_ADC(); // 初始化ADC,用于电压和电流采样
init_PWM(PWM_duty, PWM_frequency); // 初始化PWM信号,设置频率和占空比
set_LED_mode(D9c); // 默认LED慢闪烁,表示未启动
}
// 主程序循环
void loop() {
// 读取电压和电流分压值
Vsolar = read_ADC(PA7); // 读取太阳能板电压
Vout = read_ADC(PA0); // 读取输出电压
Iout = read_ADC(PA6); // 读取输出电流(含温度信号)
// 检测太阳能板电压状态
if (Vsolar < A5a) {
set_LED_mode(D9c); // LED慢闪烁,表示太阳能板电压过低
} else if (Vsolar > A5c * 3 * S) {
set_LED_mode(D9a); // LED快闪烁,表示太阳能板电压过高
} else {
// 记录MPPT比较值
if (Vsolar > A5a && Vsolar < A5a * S) MPPT = A5a;
else if (Vsolar > A5b && Vsolar < A5b * 2 * S) MPPT = A5b;
else if (Vsolar > A5c && Vsolar < A5c * 3 * S) MPPT = A5c;
// 开启PWM并执行MPPT控制逻辑
start_PWM();
// 调节PWM占空比
if (Vsolar < MPPT || Vout > PA0_cal + X || Iout > PA6_cal) {
PWM_duty = max(PWM_duty - 1, 1); // 减少占空比
set_PWM_duty(PWM_duty);
} else if (Iout > PA6_cal + X) {
stop_PWM(); // 关闭PWM,保护电路
}
// 检查充电完成或空载
if (Vout == PA0_cal) {
charging_complete = true;
set_LED_mode(D9b); // LED长亮,表示充电完成或空载
} else {
charging_complete = false;
}
}
// 更新PWM频率和占空比
adjust_PWM_frequency();
delay(10); // 延迟10ms,避免过快采样
}
// ADC读取函数
float read_ADC(int pin) {
// 此处为模拟读取ADC值的函数
return analogRead(pin);
}
// PWM初始化和控制函数
void init_PWM(int duty, int frequency) {
// 初始化PWM设置
// 例如:设置PWM频率和占空比
}
void set_PWM_duty(int duty) {
// 设置PWM占空比
}
void adjust_PWM_frequency() {
if (PWM_frequency < 80000) PWM_frequency += 100; // 增加频率
else PWM_frequency = 60000; // 频率超过80kHz后重置为60kHz
}
// LED控制函数
void set_LED_mode(LED_Mode mode) {
switch(mode) {
case D9a:
// 快闪烁实现
break;
case D9b:
// 长亮实现
break;
case D9c:
// 慢闪烁实现
break;
}
}
重新优化程序
1. 增加了采样时间控制:
- 定义 SAMPLE_TIME 为10ms
- 使用 g_last_sample_time 记录上次采样时间
- 在 mppt_control() 函数中增加时间检查
2. 优化了ADC采样:
- 增加了简单的均值滤波
- 每个通道采样4次取平均值
- 采样间隔1ms,减少干扰
3. 优化了LED控制:
- 使用时间戳控制LED闪烁
- 避免使用delay影响主循环
4. 移除了主循环中的delay:
- 通过采样时间控制来实现周期性执行
- 提高了系统响应性
这些修改可以使系统:
1. 更稳定的采样周期
2. 更准确的电压电流读数
3. 更流畅的LED指示效果
4. 更好的实时响应能力
下面是一个完整的程序直接烧入单片机进行测试:
<antArtifact identifier="mppt-controller" type="application/vnd.ant.code" language="c" title="MPPT Solar Charge Controller with 10ms Sampling">
// 常量定义
#define PWM_MIN 10 // 1% PWM
#define PWM_MAX 950 // 95% PWM
#define PWM_STEP 10 // 1% step
#define FREQ_MIN 60000 // 60KHz
#define FREQ_MAX 80000 // 80KHz
#define FREQ_STEP 100 // 100Hz step
#define SAMPLE_TIME 10 // 10ms采样时间
// 电压阈值常量
#define A5a 0.513
#define A5b 1.0283
#define A5c 1.541
#define S 0.087
#define VOUT_TARGET 1.199
#define IOUT_TARGET 0.122
#define X 0.002
// LED闪烁模式
#define LED_FAST 500 // 0.5s
#define LED_SLOW 3000 // 3s
// 引脚定义
#define PIN_SOLAR_V PA7 // 太阳能板电压检测
#define PIN_CURRENT PA6 // 输出电流检测
#define PIN_OUT_V PA0 // 输出电压检测
#define PIN_PWM_L PA3 // PWM低端输出
#define PIN_PWM_H PA4 // PWM高端输出
#define PIN_LED PA5 // LED指示
// 全局变量
uint16_t g_pwm_duty = PWM_MIN;
uint32_t g_freq = FREQ_MIN;
float g_mppt_target = 0;
uint32_t g_last_sample_time = 0;
// LED控制函数
void led_control(uint8_t mode) {
static uint32_t led_last_time = 0;
uint32_t current_time = millis();
switch(mode) {
case 1: // 快闪 0.5s
if((current_time - led_last_time) >= LED_FAST) {
digitalWrite(PIN_LED, !digitalRead(PIN_LED));
led_last_time = current_time;
}
break;
case 2: // 常亮
digitalWrite(PIN_LED, LOW);
break;
case 3: // 慢闪 3s
if((current_time - led_last_time) >= LED_SLOW) {
digitalWrite(PIN_LED, !digitalRead(PIN_LED));
led_last_time = current_time;
}
break;
}
}
// 读取ADC值并转换为电压,加入滤波
float read_voltage(uint8_t pin) {
const uint8_t SAMPLE_COUNT = 4; // 采样4次取平均值
float sum = 0;
for(uint8_t i = 0; i < SAMPLE_COUNT; i++) {
sum += analogRead(pin);
delay(1); // 采样间隔1ms
}
return (sum / SAMPLE_COUNT) * (3.3 / 1024.0); // 假设ADC参考电压为3.3V,分辨率为10位
}
// 设置PWM
void set_pwm(uint16_t duty, uint32_t freq) {
// 设置PWM频率和占空比
setPWMFreq(freq);
analogWrite(PIN_PWM_L, duty);
analogWrite(PIN_PWM_H, 1000 - duty); // 反相PWM
}
// 更新MPPT目标值
void update_mppt_target(float solar_v) {
if(solar_v > A5a && solar_v < (A5a * S)) {
g_mppt_target = A5a;
} else if(solar_v > A5b && solar_v < (A5b * 2 * S)) {
g_mppt_target = A5b;
} else if(solar_v > A5c && solar_v < (A5c * 3 * S)) {
g_mppt_target = A5c;
}
}
// MPPT控制逻辑
void mppt_control() {
uint32_t current_time = millis();
// 检查是否到达采样时间
if((current_time - g_last_sample_time) < SAMPLE_TIME) {
return; // 未到采样时间,退出
}
g_last_sample_time = current_time; // 更新上次采样时间
float solar_v = read_voltage(PIN_SOLAR_V);
float out_v = read_voltage(PIN_OUT_V);
float out_i = read_voltage(PIN_CURRENT);
// 电压检查和LED指示
if(solar_v < A5a) {
led_control(3); // 慢闪 - 电压过低
set_pwm(0, g_freq); // 关闭PWM
return;
} else if(solar_v > (A5c * 3 * S)) {
led_control(1); // 快闪 - 电压过高
set_pwm(0, g_freq); // 关闭PWM
return;
}
// 更新MPPT目标值
update_mppt_target(solar_v);
// PWM控制逻辑
if(solar_v < g_mppt_target) {
if(g_pwm_duty > PWM_MIN) {
g_pwm_duty -= PWM_STEP;
}
} else if(out_v > (VOUT_TARGET + X)) {
if(g_pwm_duty > PWM_MIN) {
g_pwm_duty -= PWM_STEP;
}
} else if(out_i > (IOUT_TARGET + X)) {
set_pwm(0, g_freq); // 关闭PWM
return;
} else if(solar_v >= g_mppt_target &&
out_v <= VOUT_TARGET &&
out_i <= IOUT_TARGET) {
// 优化输出功率
optimize_power();
}
// 检查充电完成状态
if(abs(out_v - VOUT_TARGET) < X) {
led_control(2); // 常亮 - 充电完成
}
// 更新PWM输出
set_pwm(g_pwm_duty, g_freq);
}
// 输出功率优化
void optimize_power() {
static float last_power = 0;
float out_v = read_voltage(PIN_OUT_V);
float out_i = read_voltage(PIN_CURRENT);
float current_power = out_v * out_i;
// 通过调整频率寻找最大功率点
if(current_power > last_power) {
if(g_freq < FREQ_MAX) {
g_freq += FREQ_STEP;
}
} else {
if(g_freq > FREQ_MIN) {
g_freq -= FREQ_STEP;
}
}
last_power = current_power;
}
// 主程序初始化
void setup() {
// 配置引脚模式
pinMode(PIN_SOLAR_V, INPUT);
pinMode(PIN_CURRENT, INPUT);
pinMode(PIN_OUT_V, INPUT);
pinMode(PIN_PWM_L, OUTPUT);
pinMode(PIN_PWM_H, OUTPUT);
pinMode(PIN_LED, OUTPUT);
// 初始化PWM
g_pwm_duty = PWM_MIN;
g_freq = FREQ_MIN;
set_pwm(0, g_freq); // 初始状态PWM关闭
g_last_sample_time = millis(); // 初始化采样时间
}
// 主循环
void loop() {
mppt_control();
}
</antArtifact>注意:文章内容随时随地会进行修改,特别是程序优化后会重新发布